Specially designed for autonomous driving Adaptable to various working conditions in open-pit mines.

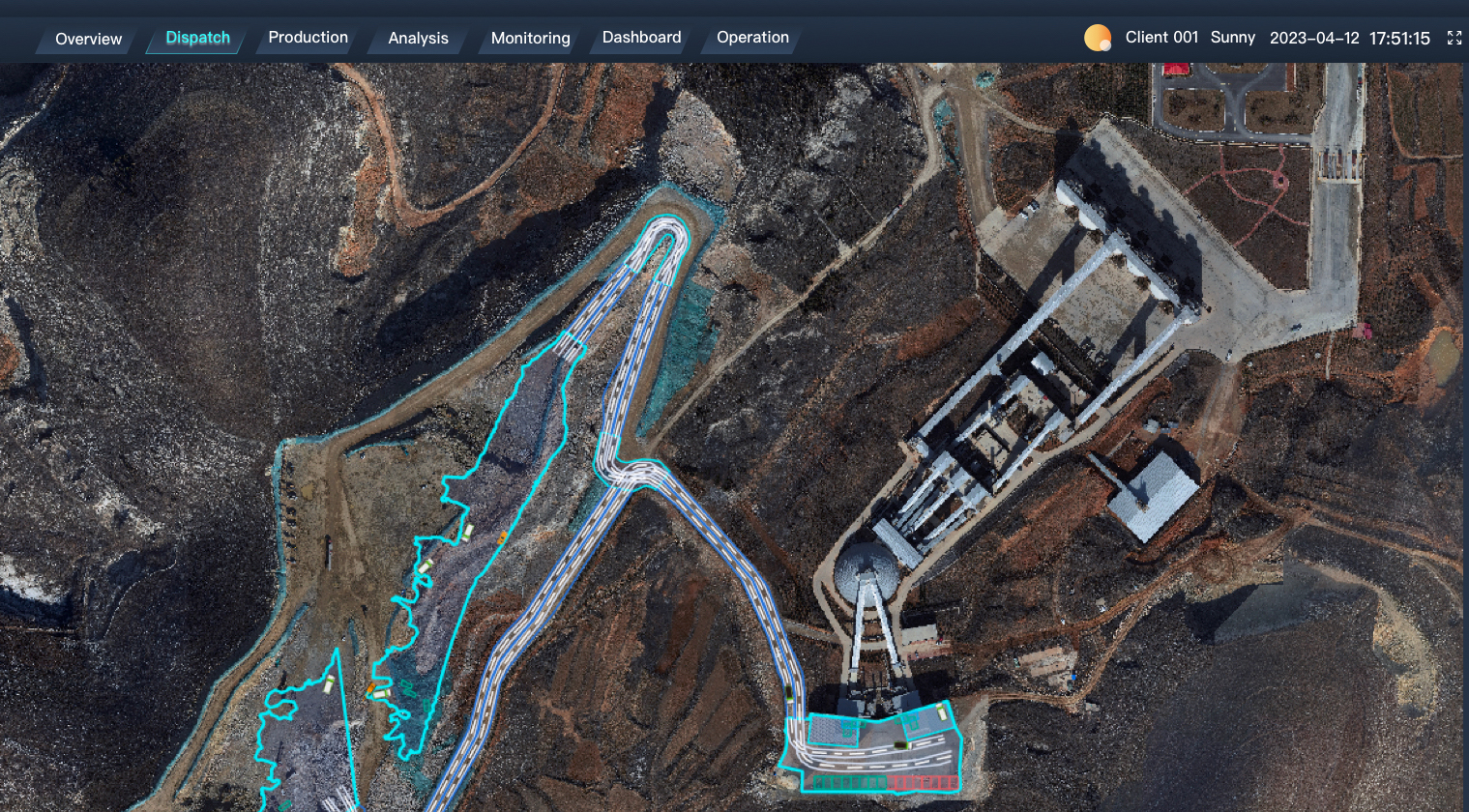
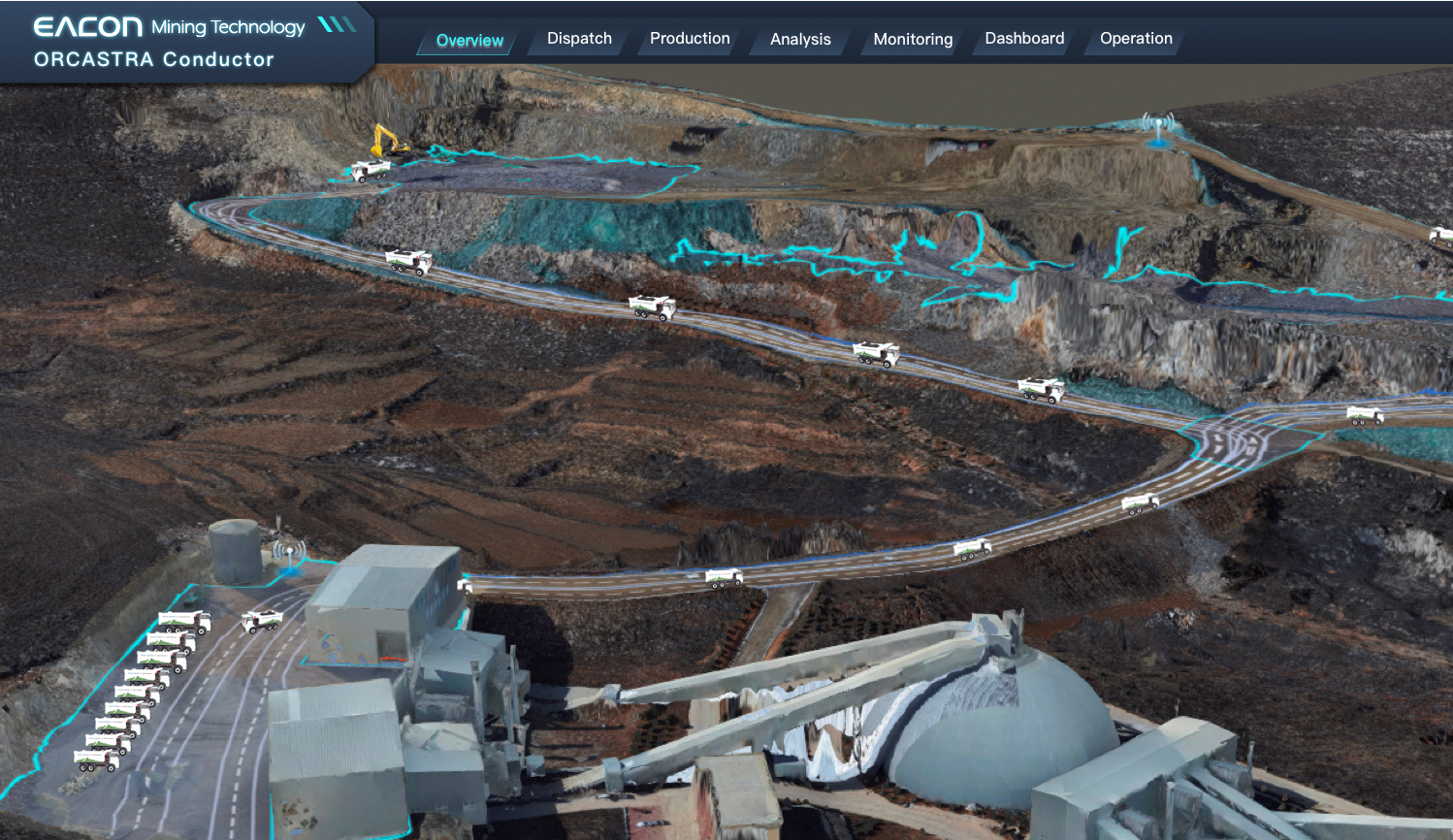
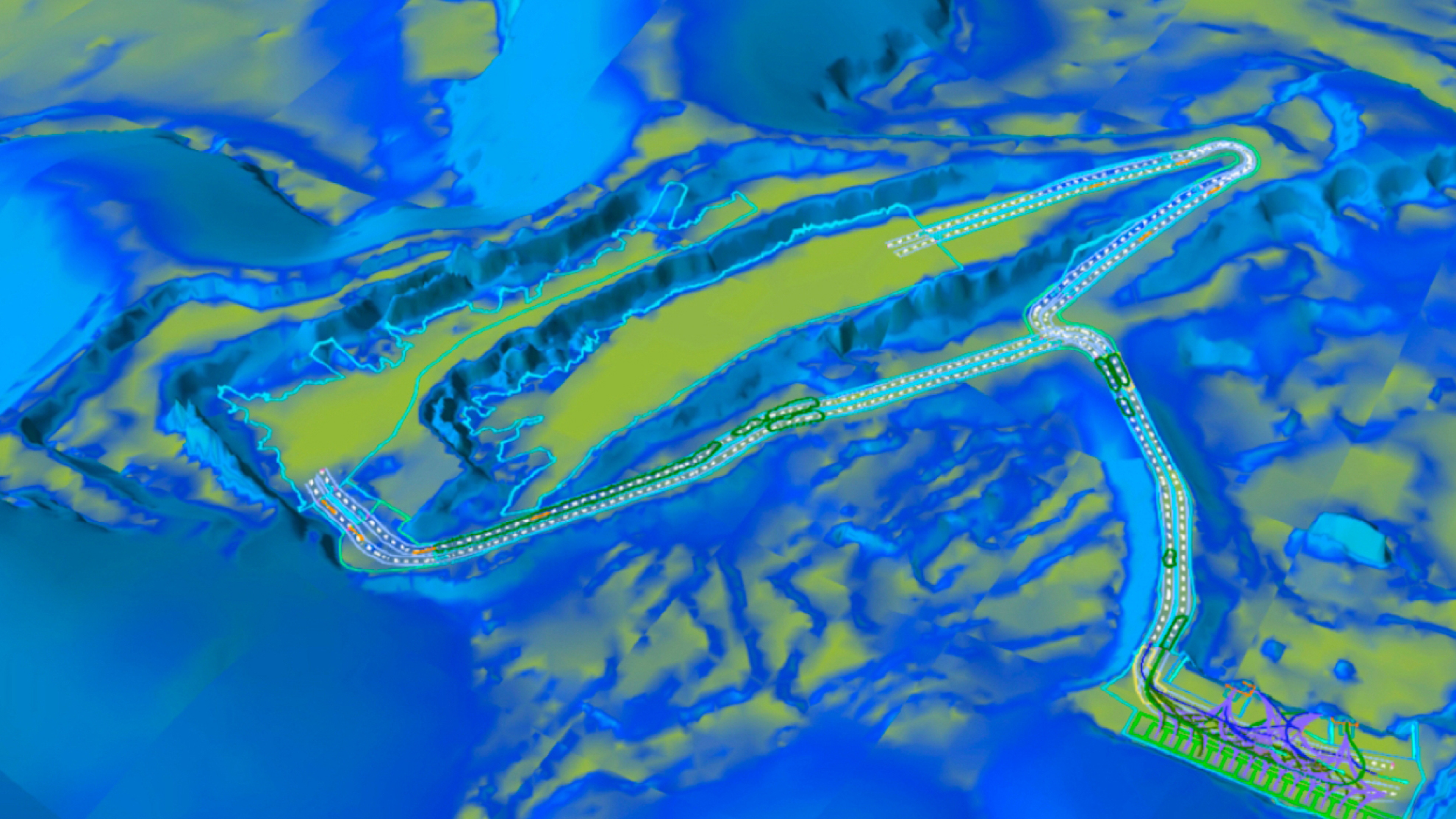
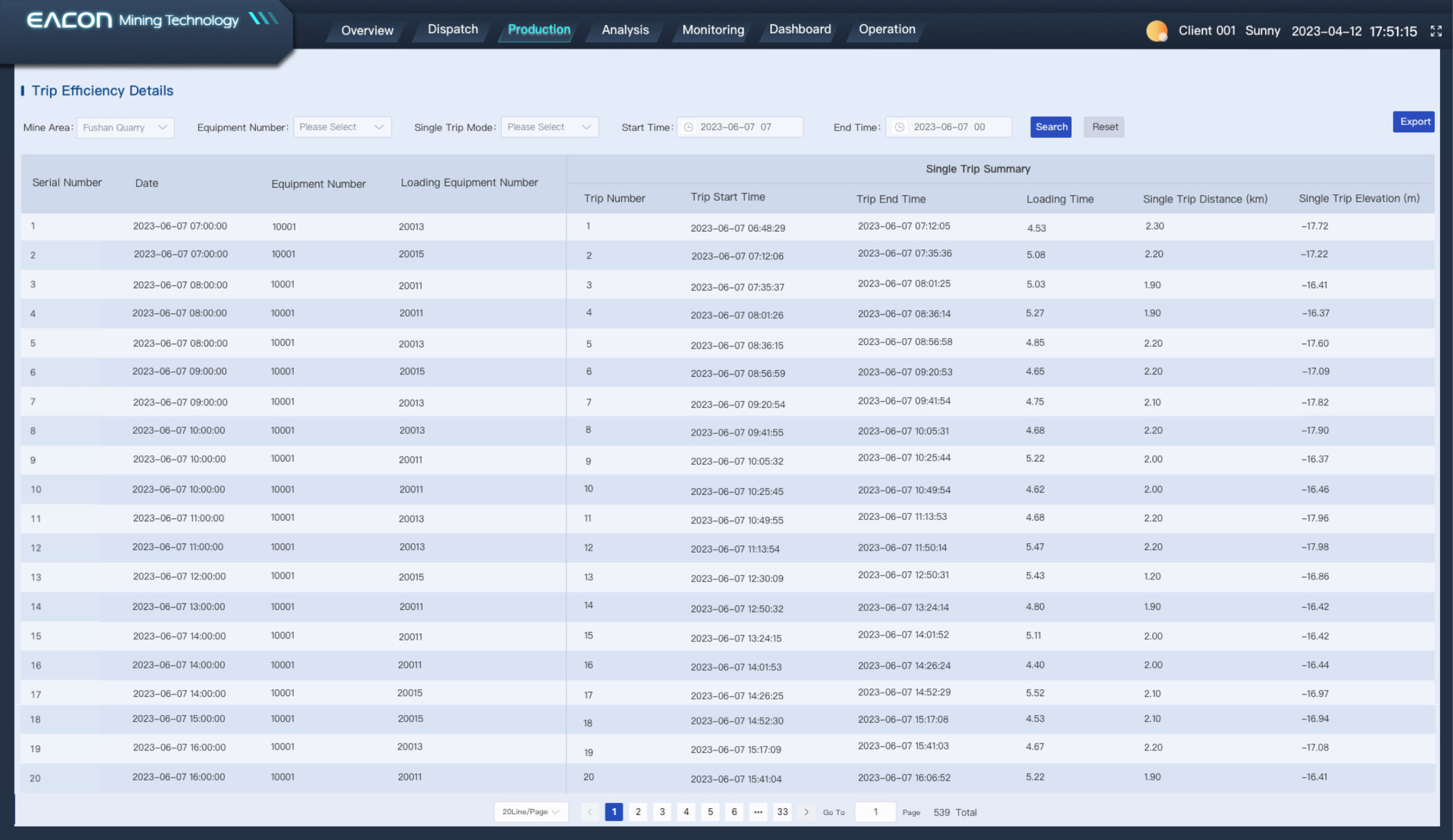
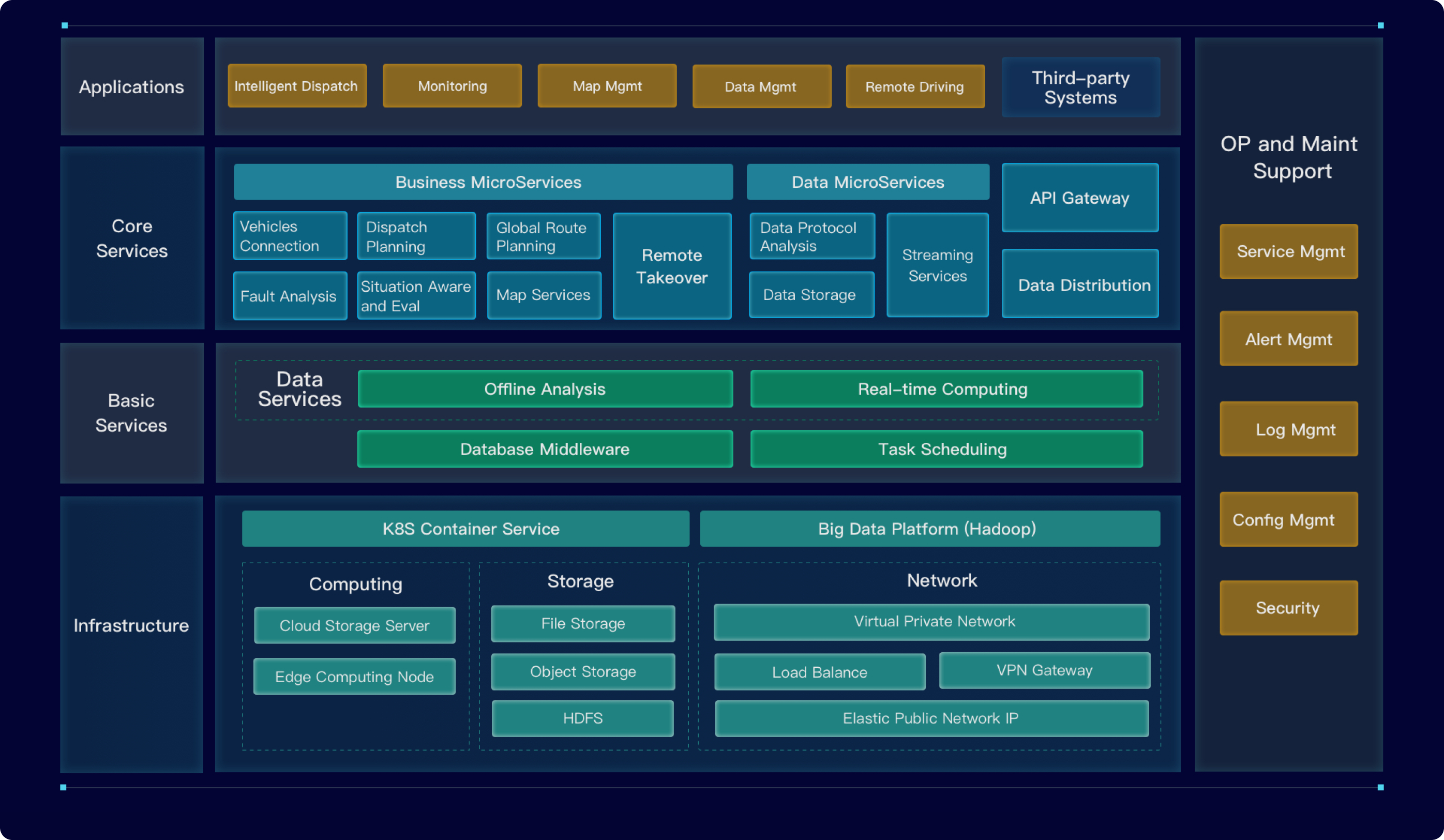
Conductor is specifically designed for mining operations, including intelligent fleet dispatching and monitoring, high-precision map update management and data analysis etc.

A safe and efficient On-board Autonomous Driving System especially designed for mining haulage.

 Detection range: 250m、Multi-sensor fusion algorithms
Detection range: 250m、Multi-sensor fusion algorithms
 Detection range: 100m, detection accuracy: 0.1m, FOV: 270° Multi-sensor fusion algorithms Identify vehicles, pedestrians, obstacles, berms, spilled materials, and ruts.
Detection range: 100m, detection accuracy: 0.1m, FOV: 270° Multi-sensor fusion algorithms Identify vehicles, pedestrians, obstacles, berms, spilled materials, and ruts.
 Remote Control Driving, 360° panoramic image
Remote Control Driving, 360° panoramic image
 RTK localization, 5cm accuracy 5G/4G public network or private network V2X network
RTK localization, 5cm accuracy 5G/4G public network or private network V2X network
 Embedded supercomputing platform Deterministic low latency Basic software and hardware conforming to functional safety requirements Highly reliable automotive-grade connectors Mass-production ready, strong adaptability
Embedded supercomputing platform Deterministic low latency Basic software and hardware conforming to functional safety requirements Highly reliable automotive-grade connectors Mass-production ready, strong adaptability
 Centralized domain electronic and electrical architecture Emergency braking and steering
Centralized domain electronic and electrical architecture Emergency braking and steering

Radar

Lidar

Camera

150-line automotive-grade LiDAR, maximum detection distance of 500m, detection range of 250m, FOV of 120×25°, environmental temperature adaptability of -40°C to 85°C
Collaboration System is composed of devices installed on manned vehicles and roadside devices, which enables safe and efficient collaboration among autonomous trucks, excavators, loaders, graders, water trucks, fuel trucks, light vehicles, etc.